Style Transfer using Pytorch (Part 3)
Goal¶
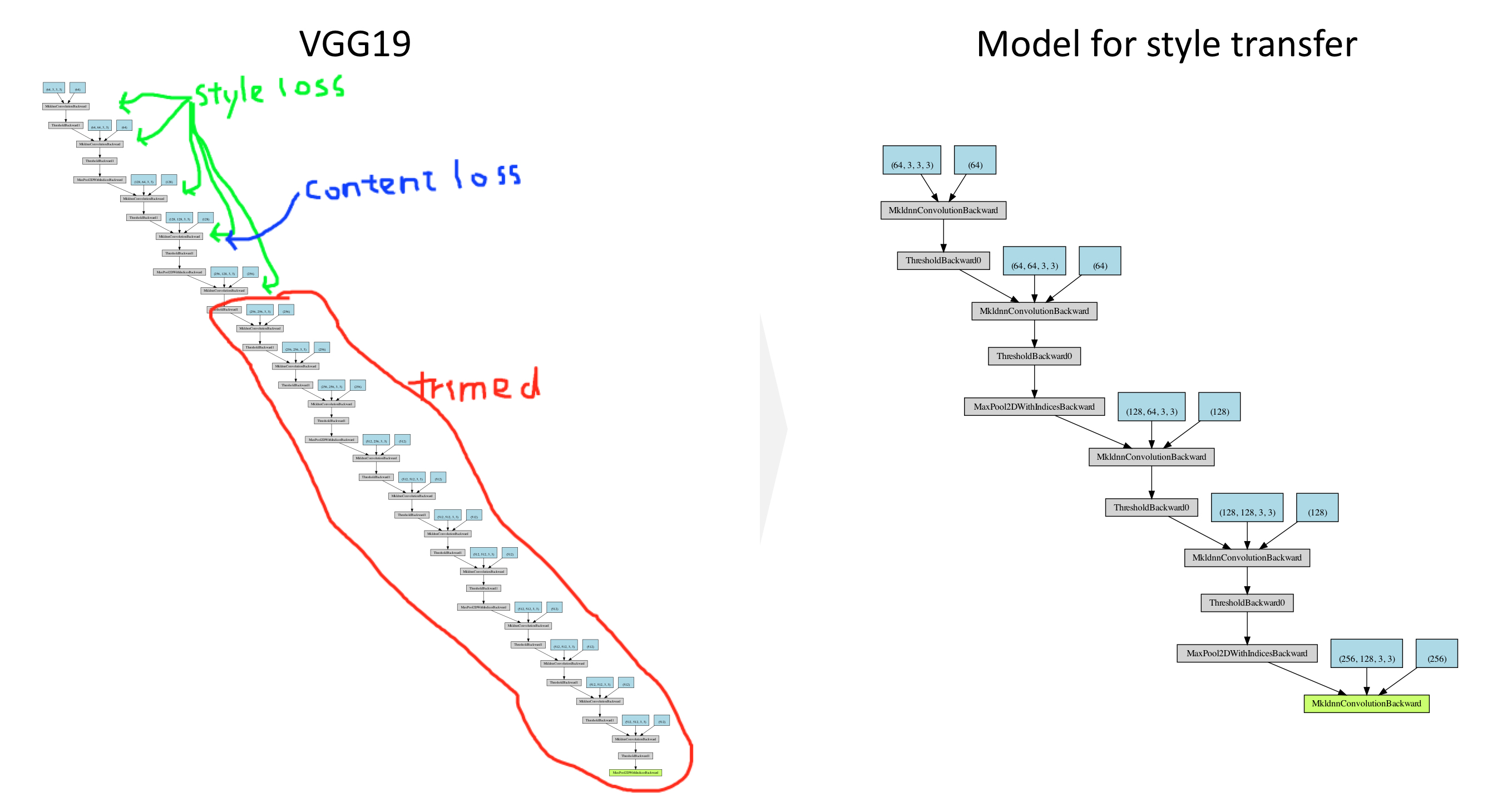
This post aims to explain the concept of style transfer step-by-step. Part 3 is about building a modeling for style transfer from VGG19.
Reference
- Ste-by-step Data Science - Style Transfer using Pytorch (Part 1)
- Ste-by-step Data Science - Style Transfer using Pytorch (Part 2)
- Original paper in arxiv - A Neural Algorithm of Artistic Style
- Colab - Neural style transfer using tesnorslow
- Towards Data Science - An Intuitive Understanding to Neural Style Transfer
Libraries¶
In [83]:
import pandas as pd
import copy
# Torch & Tensorflow
import torch
import torch.nn as nn
import torch.nn.functional as F
import torchvision
import tensorflow as tf
# Visualization
from torchviz import make_dot
from PIL import Image
import matplotlib.pyplot as plt
%matplotlib inline
Configuration¶
In [5]:
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
Functions from Part 1¶
In [122]:
# desired size of the output image
imsize = (512, 512) if torch.cuda.is_available() else (128, 128) # use small size if no gpu
loader = torchvision.transforms.Compose([
torchvision.transforms.Resize(imsize), # scale imported image
torchvision.transforms.ToTensor()]) # transform it into a torch tensor
def image_loader(image_name):
image = Image.open(image_name)
# fake batch dimension required to fit network's input dimensions
image = loader(image).unsqueeze(0)
return image.to(device, torch.float)
In [93]:
unloader = torchvision.transforms.ToPILImage()
def imshow_tensor(tensor, ax=None):
image = tensor.cpu().clone() # we clone the tensor to not do changes on it
image = image.squeeze(0) # remove the fake batch dimension
image = unloader(image)
if ax:
ax.imshow(image)
else:
plt.imshow(image)
Functions from Part 2¶
In [91]:
class ContentLoss(nn.Module):
def __init__(self, target,):
super(ContentLoss, self).__init__()
self.target = target.detach()
def forward(self, input):
self.loss = F.mse_loss(input, self.target)
return input
def gram_matrix(input):
# Get the size of tensor
# a: batch size
# b: number of feature maps
# c, d: the dimension of a feature map
a, b, c, d = input.size()
# Reshape the feature
features = input.view(a * b, c * d)
# Multiplication
G = torch.mm(features, features.t())
# Normalize
G_norm = G.div(a * b * c * d)
return G_norm
class StyleLoss(nn.Module):
def __init__(self, target_feature):
super(StyleLoss, self).__init__()
self.target = gram_matrix(target_feature).detach()
def forward(self, input):
G = gram_matrix(input)
self.loss = F.mse_loss(G, self.target)
return input
Load images¶
In [80]:
d_path = {}
d_path['content'] = tf.keras.utils.get_file('turtle.jpg','https://storage.googleapis.com/download.tensorflow.org/example_images/Green_Sea_Turtle_grazing_seagrass.jpg')
d_path['style'] = tf.keras.utils.get_file('kandinsky.jpg','https://storage.googleapis.com/download.tensorflow.org/example_images/Vassily_Kandinsky%2C_1913_-_Composition_7.jpg')
Modeling¶
Load a pre-trained CNN model - VGG19¶
In [6]:
cnn = torchvision.models.vgg19(pretrained=True).features.to(device).eval()
Visualize the model¶
In [130]:
x = torch.zeros(1, 3, 224, 224, dtype=torch.float, requires_grad=False)
out = cnn(x)
make_dot(out)
Out[130]:
Modify the pre-trained model for style transfer¶
Add normalization for input images¶
This is specific normalization required for VGG networks. Each channel for input images should be normalized by each channel normalized by mean=[0.485, 0.456, 0.406] and std=[0.229, 0.224, 0.225]
In [50]:
cnn_normalization_mean = torch.tensor([0.485, 0.456, 0.406]).to(device)
cnn_normalization_std = torch.tensor([0.229, 0.224, 0.225]).to(device)
# create a module to normalize input image so we can easily put it in a
# nn.Sequential
class Normalization(nn.Module):
def __init__(self, mean, std):
super(Normalization, self).__init__()
# .view the mean and std to make them [C x 1 x 1] so that they can
# directly work with image Tensor of shape [B x C x H x W].
# B is batch size. C is number of channels. H is height and W is width.
self.mean = torch.tensor(mean).view(-1, 1, 1)
self.std = torch.tensor(std).view(-1, 1, 1)
def forward(self, img):
# normalize img
return (img - self.mean) / self.std
Example of normalization¶
We use the functions image_loader and imshow, which is named here as imshow_tensor for tensor covered by Style Transfer using Pytorch (Part 1) to get the image as tensor.
In [65]:
import warnings
warnings.filterwarnings("ignore")
# load an example image
img_path = tf.keras.utils.get_file('turtle.jpg','https://storage.googleapis.com/download.tensorflow.org/example_images/Green_Sea_Turtle_grazing_seagrass.jpg')
img = image_loader(img_path)
# Normalize
normalize = Normalization(cnn_normalization_mean, cnn_normalization_std).to(device)
img_norm = normalize.forward(img)
# Visualize
fig, axes = plt.subplots(1, 2, figsize=(16, 8))
imshow_tensor(img, ax=axes[0]);
axes[0].set_title('Original Input'); axes[0].axis('off');
imshow_tensor(img_norm, ax=axes[1]);
axes[1].set_title('Normalized Input'); axes[1].axis('off');

Create a sequential model for style transfer¶
In [131]:
# desired depth layers to compute style/content losses :
content_layers_default = ['conv_4']
style_layers_default = ['conv_1', 'conv_2', 'conv_3', 'conv_4', 'conv_5']
def get_style_model_and_losses(cnn, normalization_mean, normalization_std,
style_img, content_img,
content_layers=content_layers_default,
style_layers=style_layers_default):
cnn = copy.deepcopy(cnn)
# normalization module
normalization = Normalization(normalization_mean, normalization_std).to(device)
# just in order to have an iterable access to or list of content/syle
# losses
content_losses = []
style_losses = []
# assuming that cnn is a nn.Sequential, so we make a new nn.Sequential
# to put in modules that are supposed to be activated sequentially
model = nn.Sequential(normalization)
i = 0 # increment every time we see a conv
for n_child, layer in enumerate(cnn.children()):
print()
print(f"n_child: {n_child}")
if isinstance(layer, nn.Conv2d):
i += 1
name = 'conv_{}'.format(i)
elif isinstance(layer, nn.ReLU):
name = 'relu_{}'.format(i)
# The in-place version doesn't play very nicely with the ContentLoss
# and StyleLoss we insert below. So we replace with out-of-place
# ones here.
layer = nn.ReLU(inplace=False)
elif isinstance(layer, nn.MaxPool2d):
name = 'pool_{}'.format(i)
elif isinstance(layer, nn.BatchNorm2d):
name = 'bn_{}'.format(i)
else:
raise RuntimeError('Unrecognized layer: {}'.format(layer.__class__.__name__))
model.add_module(name, layer)
print(f'Name: {name}')
if name in content_layers:
print(f'Add content loss {i}')
# add content loss:
target = model(content_img).detach()
content_loss = ContentLoss(target)
model.add_module("content_loss_{}".format(i), content_loss)
content_losses.append(content_loss)
if name in style_layers:
print(f'Add style loss {i}')
# add style loss:
target_feature = model(style_img).detach()
style_loss = StyleLoss(target_feature)
model.add_module("style_loss_{}".format(i), style_loss)
style_losses.append(style_loss)
# now we trim off the layers after the last content and style losses
for i in range(len(model) - 1, -1, -1):
if isinstance(model[i], ContentLoss) or isinstance(model[i], StyleLoss):
break
model = model[:(i + 1)]
return model, style_losses, content_losses
In [123]:
style_img = image_loader(d_path['content'])
content_img = image_loader(d_path['style'])
assert style_img.size() == content_img.size(), \
"we need to import style and content images of the same size"
In [132]:
# Obtain the model for style transfer
model, style_losses, content_losses = get_style_model_and_losses(cnn, cnn_normalization_mean, cnn_normalization_std, style_img, content_img)
In [134]:
x = torch.zeros(1, 3, 128, 128, dtype=torch.float, requires_grad=False)
make_dot(model(x))
Out[134]:
Comments
Comments powered by Disqus